

Günümüzde hemen hemen her yerde kullandığımız elektrik motorlarının aldıkları elektrik enerjisini nasıl dönüştürdüğünü hiç merak ettiniz mi? Bu yazımızda enerjinin tanımından başlayıp enerji dönüşümlerinden bahsederek; Elektrik motoru nedir, elektrik motorları nasıl çalışır, çalışma prensipleri nelerdir? Elektrik motor çeşitleri nelerdir? Alternatif akımda çalışan motorlar nelerdir? Doğru akımda çalışan elektrik motorları nelerdir? Senkron, asenkron, fırçalı, fırçasız, step, servo motor nedir? gibi soruların cevaplarını detaylı olarak açıkladık.


Enerjinin tanımından ve dönüşebileceğinden Enerji nedir? Kinetik enerji ve potansiyel enerji arasındaki farklar nedir? adlı yazımızda bahsetmiştik. Bu dönüşüm çeşitli enerji türleri arasında olabilir: Yükseklik potansiyeli kinetik enerjiye, kimyasal enerji elektrik enerjisine, elektrik enerjisi hareket enerjisine… Bu yazımızda sizlere elektrik enerjisinin manyetizma kullanarak fizik kuralları dahilinde ve etkileyici şekilde nasıl hareket enerjisine dönüştüğünden bahsedeceğiz. Bu dönüşümü gerçekleştiren cihaza motor denir.
Spesifik olarak elektrik motoru, elektrik enerjisini kullanarak içindeki manyetik alan etkileşimi sayesinde hareket enerjisine dönüştüren aygıttır.
Enerjinin ne olduğundan ve enerji dönüşümünün ne anlama geldiğinden bahsettikten sonra şimdi ise bu enerji dönüşümünü gerçekleştiren sistemlerden biri olan elektrik motorlarını detaylıca inceleyelim.
Elektrik Motorları
Hareket edebilen ve insan yapımı olan hemen hemen her şeyin hareketi -dönme, öteleme, titreşim- motorlar aracılığı ile sağlanır. Motorlar bir bakıma enerji dönüştürücüleridir. Dışardan gelen enerjiyi alırlar ve bunu farklı mekanizmalarla hareket enerjisine dönüştürürler. Bu dönüşüm esnasında bir miktar ısı açığa çıkar. Dolayısıyla motora gelen enerji hareket ve ısı enerjisine dönüşür dersek daha doğru olur. Çıkan ısı miktarı motorun verimini belirler ve verim, sürtünme yüzünden hiçbir zaman yüzde yüz olamaz, yüze doğru yaklaşabilir.
Çamaşır makineleri kazanlarını döndürmek için, bilgisayarlar işlemcilerini soğutmak için ve hatta telefonlar çağrı geldiğinde titremek için motora ihtiyaç duyarlar. Elektrik motorları, alternatif akımda çalışan elektrik motorları ve doğru akımda çalışan elektrik motorları olmak üzere temel olarak ikiye ayılır.
Alternatif Akım İle Çalışan Elektrik Motorları


Alternatif akım, fazlardan oluşan ve yönü sürekli değişip sabit olmayan akımdır. -Daha detaylı bilgi için “Nötr, faz, toprak nedir?” adlı yazımızı okuyabilirsiniz.- Alternatif akım ile çalışan motorlar yüksek gücün istendiği endüstriyel uygulamalarda kullanılırlar. Örneğin; bizi taşıması için üretilen trenlerde bu güç alternatif akımla çalışan senkron motorlar tarafından sağlanır. Şimdi, alternatif akım ile çalışan asenkron ve senkron motorlardan bahsedeceğiz.
1. Asenkron Motor


Yukarıda bir asenkron motora ait kesit görmekteyiz. Asenkron motorlar; rotor -endüvi de denir- ve stator adı verilen iki ana bölümden oluşur. Stator, yüksek geçirgenlikli çelik laminantların sıkıştırılarak çelik veya dökme şasi üzerinde oturtulmasıyla oluşturulur. Bobin sargılarını barındırmakla birlikte rotoru çevreleyen kısımdır. Rotor ise stator tarafından çevrelenmiş fakat statora temas etmeyen ve dönen kısma verilen isimdir. Sincap kafesli ve bilezikli rotor olmak üzere iki çeşit rotor vardır. Asenkron motorlarda oluşan enerji kayıplarıyla açığa çıkan ısı, sıcaklığı artırır ve bunu dağıtmak için soğutma fanı kullanılır. Rotorun hareketi şaft aracılığıyla dışarı aktarılır ve motorun çalışması için gerekli bağlantılar terminal kutusunda yapılır.
Asenkron Motorlar Nasıl Çalışır ?
Asenkron motorun stator kısmında üç fazdan giriş alan bobinler bulunur. Bu bobinlerden akım geçtiğinde ilginç bir durum meydana gelir.


Üzerinden akım geçen her iletken, etrafında bir manyetik alan oluşturur. Geçen akımın büyüklüğü zamanla değişiyorsa -örneğin alternatif akımda- iletkenin etrafında oluşan manyetik alanın büyüklüğü de zamanla değişir. Peki, üç faza sahip alternatif gerilimi aralarında 120° derece olacak şekilde konumlandırılmış üç ayrı bobin sargısına uygularsak ne olur? Bobinlere giden akım miktarları sürekli ve düzenli olarak değişir. Bir bobine giden akım miktarı azalırken yanındaki bobine giden akım miktarının artması durumu sürekli bir hal aldığı ve düzenli olduğu için âdeta dönen bir manyetik alan oluşur. Bu dönen manyetik alanın hızına “senkron hız” adı verilir. Senkron hız, bobinlere gelen elektriğin frekansına ve motorun kutup sayısına bağlıdır.

Statorda bulunan bobinlerin yarattığı dönen manyetik alan, rotorda bulunan iletkenin Faraday Yasası gereği üzerinde akım oluşturmasına sebep olacaktır çünkü; Faraday Yasası’na göre değişken manyetik alan içerisinde bulunan iletkenler indüksiyon akımı üretirler. Rotorda bulunan iletkenin üzerinden akım geçmesi o iletkenin de etrafında bir manyetik alan oluşmasına sebep olur. Lorentz Yasası’na göre iki manyetik alan birbirine kuvvet uygular ve rotor dönmeye başlar.

Manyetik alanın dönüş hızı rotorun hızını belirler. Rotor, dönen manyetik alanın etkisiyle alanla beraber dönmeye başladıktan sonra hızlanır ve hızı nihayet dönen manyetik alanınkine eşit olur. Ancak bu durumda rotora göre “dönen” bir manyetik alan bulunmaz çünkü ikisi de aynı hızda döndükleri için birbirlerine göre hızları sıfırdır. Bu durumda rotora etki eden net kuvvet sıfır olur ve rotor yavaşlamaya başlar. Rotorun hızı azalınca tekrar bir dönen manyetik alana maruz kalacağı için hızlanır. Burada kastetmek istediğimiz, rotorun hızı hiçbir zaman dönen manyetik alanın hızına eşit olamaz. Dolayısıyla rotor ve dönen manyetik alan asenkron hareket ederler. Bu motor tipine adını veren de bu olgudur. Rotor, her zaman dönen manyetik alanın hızından biraz daha yavaş döner.
2. Senkron Motorlar
Senkron motorlar, hız kontrolünün daha önemli olduğu ve yüksek hassasiyetin istendiği durumlarda kullanılırlar. Örneğin; motorun uygulanacağı yer bir araba veya tren ise senkron motor seçilir.

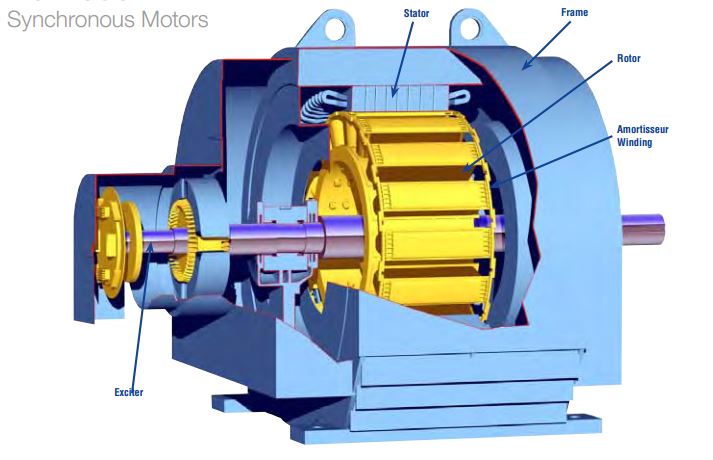
Senkron motorların bölümleri asenkron motorlar ile aynıdır; üç fazdan alınan gerilim aracılığı ile dönen manyetik alan oluşturan stator, stator ile etkileşime girerek dönme hareketini gerçekleştiren rotor, oluşan sıcaklığı dağıtma görevi üstlenen soğutma fanı, bağlantıların yapıldığı terminal kutusu ve hareketin iletildiği şaft aynen bulunur ancak burada senkron motoru asenkron motordan ayıran durum rotorun yapısının farklı oluşundan kaynaklanır.
Senkron Motorlar Nasıl Çalışır ?


Yukarıda bir senkron motora ait rotoru görmekteyiz. Rotor üzerindeki sargılar harici bir kaynaktan beslenecek şekilde doğru akım kaynağına bağlanmışlardır ve harici doğru akım kaynağına bağlanılan rotor, bir elektromıknatıs görevi görür.
Stator sargılarında üç faz aracılığıyla oluşturulan dönen manyetik alan rotordaki elektromıknatıslar ile bir araya geldiğinde asenkron motora göre farklı bir durum gerçekleşir.


Senkron motorun rotorundaki sargılara doğru akım verilmesiyle oluşan elektromıknatısın kutupları dönen manyetik alanla eşleşir. Zıt kutupların birbirini çekmesi prensibiyle birbirlerine uyguladıkları çekme kuvveti sayesinde manyetik alan ve rotor birbirine tutunur, aynı hızda, senkron olarak döner. Bu durum neticesinde asenkron motordaki kayma -manyetik alan frekansı ile rotorun frekansının farklı olması, rotor frekansının daha az olması, kayması- durumu senkron motorlarda olmaz.
Bir senkron motora ait rotorun frekansı manyetik alanın frekansı ile eşleştiğinde motor senkron olarak hareket eder ancak bu eşleşme işlemini motor belirttiğimiz haliyle yapamaz. Çok hızlı değişen manyetik alana maruz kalan rotorda bulunan elektromıknatıslar sürekli kendini çeken ve iten kuvvetlere maruz kalırlar dolayısıyla harekete kendi kendilerine başlayamazlar. Örnekle ifade edecek olursak, rotordaki elektromıknatısın N kutbu üzerinden düşünelim. Motor durgunken N kutbu statordaki sürekli ve çok hızlı değişen manyetik alana maruz kaldığında karşısına gelen kutup sürekli N ve S olacak şekilde değişir. Sürekli rotoru iten ve çeken kuvvetlerden ötürü motor çalışamaz. Oysaki motorun eşleşip senkron şekilde hareketine devam edebilmesi için rotordaki N kutbunun karşısına S kutbu gelmelidir. Bunu sağlayabilmek için ise motorun baştan hareketlendirilmesi gereklidir. Bu işlem rotorun dışına geçirilen sincap kafes ile sağlanır. Daha açıklayıcı olmak gerekirse, motor ilk başta sincap kafes aracılığıyla adeta bir asenkron motor gibi çalışmaya başlar. Bu esnada elektromıknatıslara enerji verilmez. Durgun halden harekete geçip hızını artıran motor maksimum hıza ulaştığında rotor kutuplarına enerji verilir ve böylece manyetik alan ile rotorun frekansının eşleşmesi sağlanmış olur. Senkron hıza ulaşıldığında sincap kafes, asenkron motorda olduğu gibi üzerinde değişen manyetik alan olmadığından artık indüklenmeyecektir.
Senkron motorlara bağlanan yük miktarı ne kadar artarsa artsın hız değişmeyecektir. Ancak bağlanan yük motorun o akım değerinde taşıyabileceğinden fazla ise senkronizasyon bozulacaktır ve motor çalışmayı durduracaktır. Asenkron motorlarda ise bağlanan yük miktarı arttıkça motor hızı düşer.
Senkron motorlar asenkron motorlara göre daha verimlidirler, daha hassas ve kararlı çalışırlar. Bu da elbette fiyat karşılaştırmasında senkron motorları daha pahalı yapmaktadır.
Doğru Akım ile Çalışan Elektrik Motorları


Doğru akım, yüksek potansiyelli artı ve düşük potansiyelli eksi kutuplarından oluşur. -Daha detaylı bilgi için “Akım Savaşları: Doğru Akım- Alternatif Akım Karşılaştırılması” adlı yazımıza göz atabilirsiniz.- Bu tür motorlar doğru akımın kullanıldığı sistemlerde tercih edilirler. Telefonlarda bulunan titreşim motoru, laptop soğutma fanları DC motorlara örnektir. Özellikle alternatif akım ile çalışmanın tehlike yaratabileceği yerlerde -örneğin oyuncaklarda- küçük, batarya/pil aracılığı ile çalıştırılabilmesi sebebiyle tercih edilirler. Doğru akım motorları temel olarak fırçalı (Brushed) DC motorlar, fırçasız (Brushless) DC motorlar, Servo motorlar ve Step motorlar olmak üzere dörde ayrılır.
1. Fırçalı (Brushed) DC Motorlar


Genel itibariyle elektrik motorları aldıkları elektrik enerjisini birtakım elektromanyetik etkiler sayesinde hareket enerjisine dönüştürürler. Üreticiler bazı kullanım gereksinimleri bakımından bunları gruplandırır. Bu gruplardan biri olan fırçalı DC motorlar da diğer diğer motor türlerine benzer prensiple çalışır. Dolayısıyla içerdiği parçalar yapısal olarak bazı farklılıklar içerebilmekle birlikte çoğunlukla isim olarak aynıdır. Rotor, stator, şaft, bağlantı (terminal) kutusu ve soğutma fanı -küçük motorlarda ihtiyaç duyulmaz- DC motorlarda da aynen bulunur. Ancak DC motorları AC motorlardan ayıran temel husus şudur: AC motorlarda statordaki bobinleri üç fazlı alternatif akımla besleyerek adeta dönen bir manyetik alan oluşmasını sağladığımızı hatırlayalım. DC akım sabit ve değişmediği için dönen bir manyetik alanı DC motorların statoru için oluşturmamız durumu pek söz konusu olmaz. Bunun yoksunluğunu giderip sistemi çalışır kılabilmek için fırça ve komütatör eklenerek birtakım değişikliğe gidilir. Elbette bahsettiğimiz fırça, yaylı ve iletken bir aksamdır. Komütatör ise fırçalar ile temas eden ve rotora sabit olan kısımdır. Hadi inceleyelim.

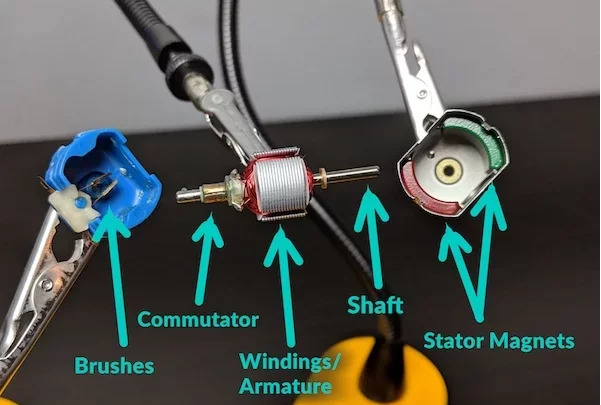
Fırçalı (Brushed) DC Motorlar Nasıl Çalışır ?

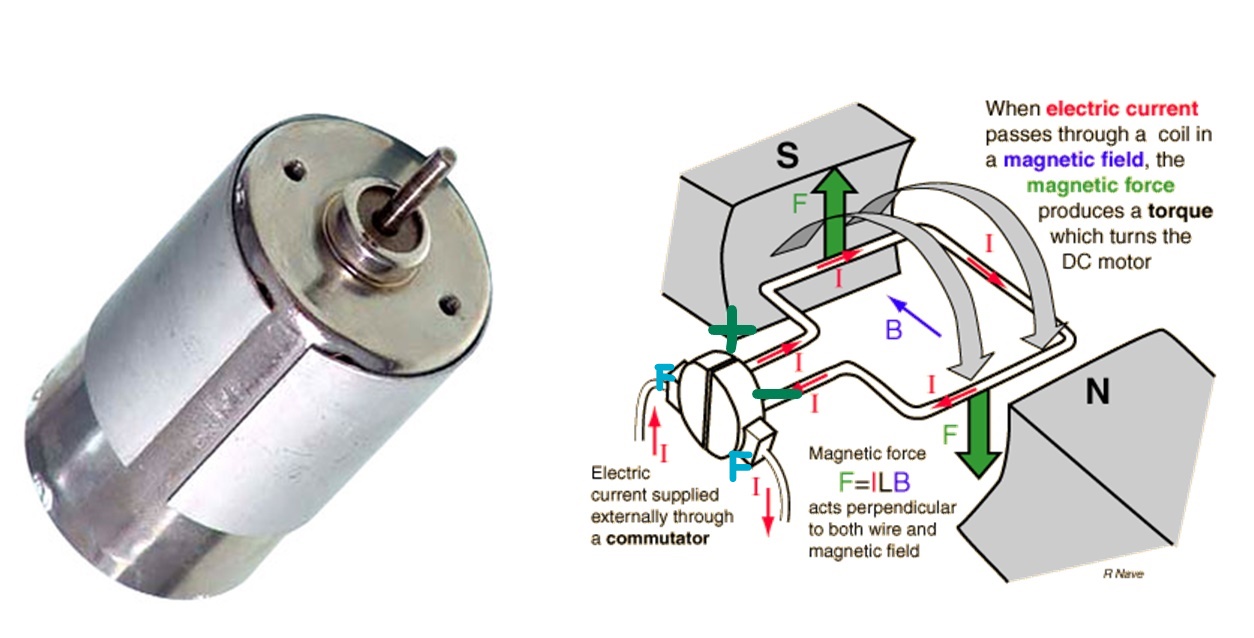
Fırçalı DC motorların statorunda, kutuplarının arasına rotoru alacak şekilde konumlandırılmış bir mıknatıs bulunur. Bu mıknatısın arasında bulunan rotora doğru akım verildiğinde rotordaki iletkenden akım geçer. Mıknatısın yarattığı manyetik alana maruz kalan ve içerisinden akım geçen iletkene bir tork etki eder ve dönmeye başlar çünkü üzerinden akım geçen iletken bir manyetik alan içerisinde konulursa o iletkene kuvvet etki eder. Burada hareketin devamlılığını sağlamak için olmazsa olmaz şey fırçadır. Bu durumu yukarıdaki resme bakarak anlamaya çalışalım. Artı ve eksi kutupları bağlanmış olan metal levhaya enerji verildiğinde levhadan saat yönünde bir akım geçer ve sağ el kuralına göre levhaya bir kuvvet etki eder. Resme göre bu kuvvet saat yönündedir.
Metal levha 180° derece döndüğünde eğer fırça olmamış olsaydı bu sefer akım saat yönünün tersine olacaktı ve kuvvet de saat yönünün tersine etki edecekti. Bunun sonucunda rotor gittiği yere geri dönecekti. Bu şekilde oluşan anlamsız hareketlenmeler sistemi kullanılamaz kılacaktı. Kullanılan fırçalar sayesinde metal levha dönse dahi her zaman akım levhadan saat yönünde akacak şekilde verilmiş olur ve böylece motor sürekli olarak döner.

Yukarıdaki GIF ile az önce bahsettiğimiz durumu iyice kafamıza oturtalım. Dönen metal levhanın iki ucundan biri başta artı kutba değiyor ise 180° derece döndüğünde eksi kutba değer. Bu sayede bahsettiğimiz üzere herhangi bir anda bakıldığında levhadan geçen akımın yönü hiç değişmez ya hep saat yönündedir ya da tersi yöndedir. Dolayısıyla uygulanan kuvvetin yönü değişmez, aynı yönde kalır ve motor sürekli dönebilmeye başlar. Ancak yine bir problem var. Metal levhaya etki eden kuvvet, levha mıknatısa yaklaştıkça artar, uzaklaştıkça azalır. Levha –GIF’e göre- düzleme dik olduğunda ise kuvvet etki etmez. Dolayısıyla levha üzerine etki eden kuvvetin sürekli farklı olması sebebiyle rotor, sağlıklı ve kararlı bir şekilde dönemeyecektir.


Tek iletken levhanın/bobinin olması sistemi kararsız çalıştıracağı için rotordaki metal levha/bobin sayısı yukarıdaki GIF’te de görüleceği üzere bir adetten fazla olur ve sistemin kararlı bir şekilde çalışması böylece sağlanır. Bir bobine etkiyen kuvvet azalırken diğer bobine etkiyen kuvvet artar böylece sistem kararlı çalışır.
Statordaki mıknatıslanma etkisi daimi mıknatısla sağlanabileceği gibi bobin eklenip DC voltaj verilerek oluşturulan bir elektromıknatıs ile de sağlanabilir. Hatta çok küçük motorlar haricinde genellikle elektromıknatıs oluşturma yöntemi tercih edilir. Sebebi çok basit; mıknatısın etkisi zamanla azalabilir ancak elektromıknatısın gücü zamanla azalmayacak akım verildiği taktirde hep aynı güçte çalışacaktır.
2. Fırçasız (Brushless) DC Motorlar
Fırçalı motorların fırçaları zamanla sürtünmeden ötürü dışarı çıkar ve kıvılcım oluşturabilir. Dolayısıyla bu tip motorlar asla uzun ömür ve güvenirlilik garanti etmez. Aynı zamanda fırçaların yarattığı sürtünme motorun verimini azaltır çünkü ısıya dönüşecek enerji miktarı artar. Bu negatif etkilerin söz konusu olmadığı fırçasız tip DC motorlar, işlemleri daha güvenli ve daha az gürültülü yapmak için tercih edilirler.

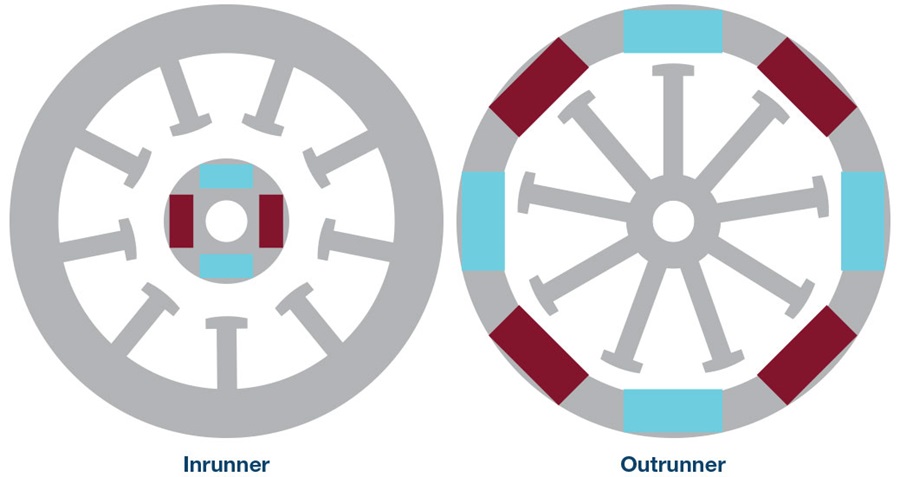
Nasıl çalıştığına bakmadan önce fırçasız DC motorların kaç tip olduklarından bahsedelim. Yukarıdaki şekillere bakacak olursak; Inrunner ve Outrunner olmak üzere temel olarak iki tip fırçasız DC motor bulunur. Inrunner motorlarda adından da anlaşılacağı üzere rotor içte bulunur, dönme hareketi iç kısımda gerçekleşir. Bobinler ise dış kısımdadır. Outrunner motorlarda ise rotor ve üzerinde bulundurduğu mıknatıslar dış kısımdadır. İçte ise üzerinde bobin sargıları bulunduran stator yer alır.
Fırçasız (Brushless) DC Motorlar Nasıl Çalışır ?


Yukarıda Inrunner fırçalı bir motora ait parçaları görmekteyiz. Kolayca fark edilebileceği üzere Hall sensörünü bulunduran devre kartı haricinde diğer parçalar aynıdır. Peki Hall sensörünün işlevi nedir ?

Fırçasız DC motorlarda tahmin edebiliriz ki fırça bulunmaz. Bu durumda motorun hareketini sağlayabilmek için fırça işlevi gören ve onun yerini alabilecek bir düzenek gereklidir. Bu da fırçalı motorlarda olduğu gibi mekanik olarak değil, elektronik olarak Hall sensörleri aracılığıyla sağlanır.
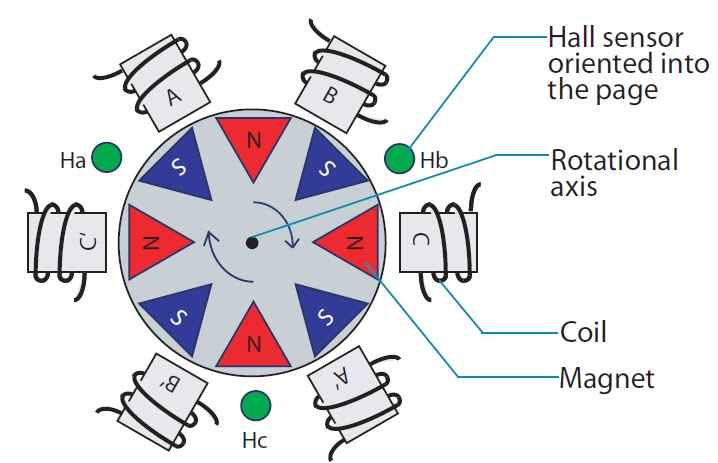
Yukarıdaki resim üzerinden açıklayacak olursak, rotorda bulunan mıknatısların karşısında A,B ve C olarak temsil edilmiş üç adet bobin grubu vardır. Rotorun hareketi Hall sensörlerinden alınan verilerin mikrodenetleyici tarafından işlenmesiyle tespit edilir. Sonra ise bu üç bobin grubuna belirli zamanlarda ve sırasıyla enerji verilmesi yöntemiyle rotorun hareket etmesi veya hareket ediyorsa buna devam etmesi sağlanır. Aslında bu mantık AC asenkron motorların çalışmasını biraz anımsatıyor. Değil mi?


GIF’e bakarak eklemeler yapalım. Hall sensörü rotorun verilerini toplar demiştik. Sonrasında da uygun bobinlere akım verilerek rotorun hareketi sağlanır. Akım verilen bobinin yanındaki bobinlere de hareketi destekleyecek şekilde enerji verilir böylece tork ile hız artırılmış ve fırçasız motorun daha kusursuz çalışması sağlanmış olur.
3. Servo Motorlar
Buraya kadar bahsettiğimiz bütün motorlar sürekli dönme hareketi yapan motorlardır. Enerji verildiğinde motora ait rotor sürekli kendi etrafında dönecektir. Ancak bazen motorun eylemini kontrol etmek, hızını sabitlemek veya motorun sadece bizim istediğimiz kadar dönmesini sağlamak isteyebiliriz. Şöyle bir durum hayal edelim: Evimizin çatısında bir adet güneş paneli olsun ve bu güneş panelinin güneşi takip etmesini sağlayarak maksimum verim almayı amaçladığımız bir sistem kurmak istediğimizi varsayalım. Kuracağımız düzenekte kullanacağımız motorun belli zamanlarda belirli miktarda dönerek güneş panelini güneşe her zaman bakacak şekilde ayarlamasını istediğimizde sistemdeki motor eğer sürekli dönerse planladığımız şeyi istediğimiz gibi çalıştıramayız. Bizim motoru öyle bir sistem içerisinde kullanmamız gereklidir ki motorun konumunu ayarlayarak onu belli açılarda döndürüp güneşe doğru her zaman baktırabilelim. Bunu sağlayan sistem ise servo motorlardır. Sistem dememizin sebebi aslında servo motorların motordan daha fazlasını içeren düzenekler olmalarıdır.
Servo düzenekleri bir geri bildirim mekanizmasıyla motorun hareketini algılar ve motorun eylemini kontrol altına almamızı sağlarlar. Basitçe bir servo motor; motor, geri bildirim sistemi ve kontrol devresi olmak üzere üç bölümden oluşur. Burada kullanılan motor AC veya DC, fırçalı veya fırçasız ve herhangi bir boyutta olabilir. Geribildirim için yani motorun hareketini algılamayı sağlamak için ise üzerindeki direncin değişmesinden faydalanılarak kullanılan bir potansiyometre, manyetik alanın varlığını kullanarak ölçüm yapan Hall sensörü veya motorun konum tespiti için bize yardımcı olabilecek herhangi bir sensör kullanılabilir. Servo sistemi tamamlamak için ise motordan veri alan sensörün bağlı olduğu ve o değerleri anlamlandıran kontrol elektroniği devresi bulunur.
Servo Motorlar Nasıl Çalışır ?

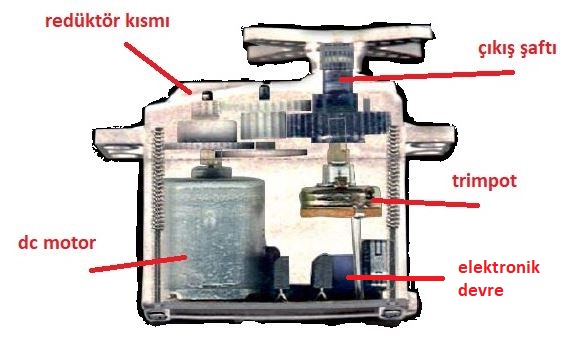
Yukarıda hobi devrelerinde kullanılan bir servo motor görmekteyiz. Bu servo özelinde konuşarak anlatacak olursak servo motorun çalışması şu şekildedir : Sisteme bağlı bulunan DC motorun dönmesi dişliler aracılığıyla bağlı olduğu trimpotun (potansiyometre) da dönmesini sağlar ve trimpotun üzerine düşen direnç miktarı motor hareket ettikçe değişir. Bu değişim değerlerini kontrol devresi ile okuyarak motorun konumu hakkında bilgi sahibi olabilir hatta istersek yazacağımız kodlar aracılığıyla motoru istediğimiz konuma getirebiliriz. Şöyle düşünelim; elimizde 10k ohm direncine sahip bir potansiyometre bulunsun. Direnç değeri sıfırken potansiyometreyi bir motora dişliler aracılığıyla bağlayalım. Kontrol devresi aracılığıyla okuduğumuz değerler için motorun şöyle bir aksiyon almasını isteyebiliriz: Harekete başla, potansiyometrenin direnç değeri 10k ohm’a ulaşıncaya kadar motoru döndür ve nihayet ulaştığında motoru durdur. Görüldüğü üzere motorun hareket ederken konumunu potansiyometre aracılığıyla belirledik ve istediğimiz spesifik hareketi yaptırdık.
Başka bir servo motor örneği olarak araçlardaki hız sabitleyiciyi (cruise control) verebiliriz. Mevcut hız sensörünün motordan aldığı verileri yorumlayarak motora gerekli enerjiyi verip hızının sabit kalmasını sağladığı cruise control mekanizması da görüldüğü üzere servo motora bir örnektir.
Servo motorların dönüş miktarı PWM çıkış pini üzerinden verilen PWM sinyalleri ile ayarlanabilir, motor istenen konuma döndürülebilir.
4. Step Motorlar


Step motorlar isimlerinden de fark edileceği üzere adım adım hareket eden motorlardır. Bu özellikleri onların gerçekten çok hassas şekilde hareket edebilmelerini sağlar. Hassasiyetin önemli olduğu yazıcılarda, CNC makinalarında, 3D printerlarda, lazer kesicilerde, tutma ve yerleştirme makinalarında gibi birçok alanda tercih edilirler. Günümüzde kullanılan çok gelişmiş ve karmaşık yapıya sahip step motorlar bulunmaktadır ancak çalışma prensibini öğrenmek adına dört aşamalı bir step motorun çalışmasını inceleyerek çalışma şeklini anlamaya çalışalım.
Step Motorlar Nasıl Çalışır ?

Step motorlar -dört aşamalılardan bahsettiğimizi hatırlarsak- dört adet bobinin statora yerleştirilmesiyle oluşturulurlar. Statorda bulunan bobinlerin her biri tek başına enerjilendirilebilecek şekilde çıkışa sahiptir. Rotorda ise daimî mıknatıs bulunur. GIF’de de görüldüğü üzere herhangi bir bobin enerjilendirdirildiğinde mıknatıs, enerjilendirilmiş bobine doğru hareket eder. Rotorun hareketi bu şekilde sağlanır ve bu bir adıma eşittir. Eğer ardışık iki bobine aynı anda enerji verilirse rotor iki bobinin arasına konumlanır. Bu durumda da rotor yarım adım atmış olur.




Dört aşamalı bir step motor 5 adet çıkışa sahiptir. Bir tanesi ortak kutup olmakla birlikte diğerleri de her bobini ayrı ayrı kontrol eden çıkışlardır. Her bir çıkışı belli bir düzen içerisinde enerjilendirerek motorun anlamlı bir şekilde hareket etmesi sağlanır. Bunu elbette insan eli ile yapmak mantıklı değildir bu yüzden step motorların kontrolü harici bir mikrodenetleyici tarafından yapılır. İçerisinde yazılan koda göre çıkışlara belli bir düzende enerji vererek motorun istenilen şekilde hareket etmesi sağlanır.
Benzer tarzda yazılar okumak için sitemizde yer alan “Güç Kalitesi” kategorisine göz atabilirsiniz.
Kaynaklar:
- http://web.firat.edu.tr/eemuh/download/laboratuvar/kontrol/clabexp9.pdf
- https://www.youtube.com/watch?v=M9-FWM52oac
- https://www.youtube.com/watch?v=AQqyGNOP_3o&list=PLuUdFsbOK_8qVROrfl2M2WSV2xAz-ABVU&index=7
- https://www.elektrikport.com/teknik-kutuphane/asenkron-motorlar-1-bolum/12177#ad-image-0
- https://www.youtube.com/watch?v=Vk2jDXxZIhs
- https://www.youtube.com/watch?v=59HBoIXzX_c
- https://www.youtube.com/watch?v=OxoGG9SoVG4
- https://www.elektrikport.com/universite/elektrik-motorlari-ikinci-bolum/8337#ad-image-0
- https://www.youtube.com/watch?v=6ba3ZAD9hGg
- https://www.youtube.com/watch?v=F3iGAPx5Leg&t=157s
- https://www.kollmorgen.com/tr-tr/blogs/_blog-in-motion/articles/servo-motorlar-nasil-calisir/
- https://www.youtube.com/watch?v=dhzL9snzaJY